28.03.2024
Kooperative intelligente Verkehrssysteme (Cooperative Intelligent Transport Systems, kurz C-ITS) können die Sicherheit im Straßenverkehr erhöhen, Unfälle reduzieren und den Verkehrsfluss verbessern. Der Einsatz von C-ITS bietet auch Vorteile bei der Integration von automatisierten Fahrzeugen in das bestehende Verkehrssystem. Das Zusammenspiel von automatisierten Fahrzeugen und digitaler Infrastruktur wird im Rahmen des EU-Projekts SHOW (SHared automation Operating models for Worldwide adoption) an den drei österreichischen Pilotstandorten in Graz, Kärnten und Salzburg getestet.
Im EU-Projekt SHOW wird nicht nur die Technologie der automatisierten Fahrzeuge weiterentwickelt und in realen Anwendungsfällen getestet, ein weiterer Fokus liegt auf dem Einsatz von kooperativen intelligenten Verkehrssystemen (C-ITS). Das Zusammenspiel zwischen automatisierten Fahrzeugen und unterstützender Infrastruktur wird auf den drei österreichischen Pilot Sites in unterschiedlichen Szenarien untersucht.
Die Pilot-Site Graz testet automatisierte Mobilität als Ergänzung zum öffentlichen Verkehr im urbanen Umfeld. Zwei vollautomatisierte Pkw befördern Fahrgäste auf einer zwei Kilometer langen Strecke zwischen dem Nahverkehrsknoten Puntigam und dem Einkaufszentrum „Center West“ in Graz. In Puntigam wird die fahrzeugseitige Sensorik der automatisieren Fahrzeuge durch externe Sensoren unterstützt, um die Durchfahrt durch den belebten Knotenpunkt zu optimieren.

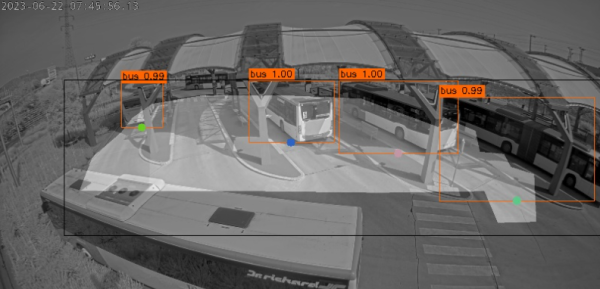
Damit die Belegung der Busbuchten überprüft werden kann, wurde durch Yunex Traffic ein awareAI Kamerasystem sowie eine Roadside Unit (RSU) in Betrieb genommen. Der erfasste Videostream des awareAI Systems wird ausschließlich lokal analysiert und verarbeitet. Resultierende Informationen über den Belegungszustand der Busbuchten werden anschließend an die lokal verbundene C-ITS RSU übertragen, sodass diese, in Form einer Freitext Nachricht basierend auf den IVI („In-Vehicle Information“)-Nachrichtenstandard, über den ITS-G5 Funkkanal fortlaufend ausgesendet werden.
Ebenso befinden sich Straßenbahngleise am Nahverkehrsknotenpunkt Puntigam, die von den vollautomatisierten Fahrzeugen im Zuge ihrer Fahrroute gekreuzt werden. Die Straßenbahnübergänge sind lokal mit einem Warnlicht abgesichert, das beim Herannahen einer Straßenbahn ausgelöst wird. Diese Warnlichter wurden um eine C-ITS Funktion erweitert, sodass parallel eine C-ITS DENM- Warnnachricht („Decentralized Environmental Notification Message“) ausgesendet wird.
Die Nachrichten über die Belegung der Busbuchten und des Warnsignals können von den On-board Units (OBUs) der automatisierten Fahrzeuge empfangen werden. Als OBU kommt die vehicleCAPTAIN toolbox zum Einsatz. Die erhaltenen Nachrichten fließen in das Planungssystem der Fahrzeuge ein und ergänzen die fahrzeugseitige Sensorik. Somit ist es möglich, dass das Fahrzeug automatisch die erste verfügbare Busbucht auswählt und völlig selbstständig die Strecke bewältigen kann. Bei den Testfahrten hat sich gezeigt, dass dadurch ein flüssigerer Fahrbetrieb gewährleistet werden kann.
In Kärnten werden Anwendungen von automatisierten Shuttles für den Personen- und Gütertransport in einem komplexen Verkehrsumfeld getestet. In Klagenfurt am Wörthersee werden die automatisierten Shuttles ab Frühjahr 2024 auf einer Strecke zwischen Universität, Lakeside Park, einem Forschungs- und Technologie Hub und einem Freizeitpark (Minimundus) verkehren.
Die geplante Route erfordert das Linksabbiegen bei der Ausfahrt eines Parkplatz (Park & Ride Klagenfurt West), wobei das Fahrzeug einen Fußgänger:innenübergang überqueren muss. Diese Abbiegesituation ist anspruchsvoll. Um die sichere Passage aller Verkehrsbeteiligten sicherzustellen, wird die Sensorik des Shuttles durch externer Sensorik beim Abbiegen unterstützt.
Am Fußgänger:innenübergang hinter der Kreuzung liegt die Schwierigkeit im Erkennen aller Verkehrsteilnehmenden und ihrer jeweiligen Position und Geschwindigkeit.
Die Integration von Informationen aus der digitalen Infrastruktur soll die Reichweite der Fahrzeugsensoren verbessern. Insbesondere soll dadurch erkannt werden, ob sich Verkehrsteilnehmende auf dem Übergang befinden. Hierbei wird das awareAI Kamerasystem von Yunex Traffic eingesetzt. Die Kamera wurde in einer Höhe von sechs Metern über der Fahrbahn an einem Ampelmast angebracht, um sowohl den Zebrastreifen als auch den angrenzenden Gehsteig zu erfassen und gefährdete Verkehrsteilnehmer:innen lokal zu identifizieren.
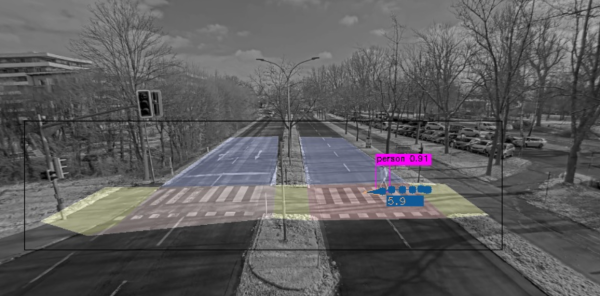
Die intelligente Infrastruktur löst nur dann ein Warnsignal aus, wenn sich Fußgänger:innen oder Radfahrer:innen in den entsprechenden Bereichen befinden. Die Warnnachricht wird vom awareAI-System generiert und als DENM-Nachrichten nach dem ETSI-Standard über den ITS-G5-Funkkanal von der RSU gesendet.
Außerdem übermitteln diese RSU und drei weitere Yunex Traffic Roadside Units entlang der Strecke kontinuierlich den aktuellen Signalisierungszustand der verkehrslichtgesteuerten Kreuzung in Form von SPATEM-Nachrichten ("Signal Phase and Timing"). Die Knotentopologie der jeweiligen Kreuzung wird durch MAPEM-Nachrichten („MAP (topology) Extended Message“) übermittelt, um eine eindeutige Zuordnung der Signalzustände zur Topologie zu ermöglichen. Diese Nachrichten können von allen Fahrzeugen empfangen werden, die mit einer entsprechenden OBU ausgestattet sind.
Im Frühjahr 2023 wurde die implementierte intelligente Infrastruktur in Klagenfurt mit dem AustriaTech Mobile Lab getestet. Das Mobile Lab ist ein Tool zur Verifizierung und Validierung von C-ITS-Meldungen. Im Test meldete das Mobile Lab jedes Mal eine Nachricht von der RSU, wenn eine Person den Zebrastreifen überquerte. Die Kommunikation funktionierte im Test fehlerfrei. Der Nutzung der Information durch die automatisierten Shuttles steht damit nichts im Weg.

Am Pilotstandort Salzburg werden automatisierte Fahrzeuge eingesetzt, um die Anbindung der Ortschaft Koppl an den öffentlichen Verkehr zu verbessern. Die Routen der Fahrzeuge verbinden die Haltestelle Koppl Sperrbrücke, die von Linienbussen entlang der B158 angefahren wird, mit dem Ortszentrum. Dadurch wird die Lücke der ersten/letzten Meile geschlossen. Zur Optimierung des Einsatzes von automatisierten Fahrzeugen in Koppl und entlang des Linienverkehrs nach Salzburg (Stadt) wird zusätzliche digitale Infrastruktur genutzt. Insgesamt fünf Roadside Units (RSUs) senden Informationen zur Positionsbestimmung, zum Kollisionsrisiko und zur Detektion gefährdeter Verkehrsteilnehmenden aus.
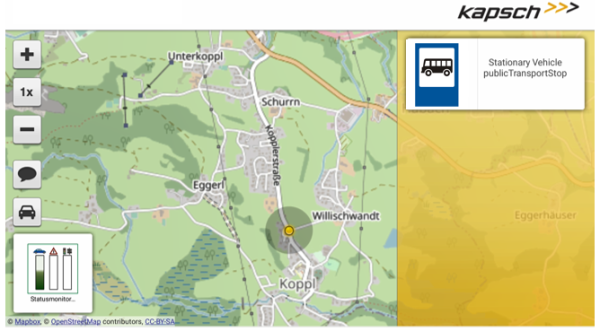
Im Anwendungsfall “Public Transport vehicle at a stop” sind vordefinierte Standorte und deren Auslösebereiche in der On-board Unit (OBU) des automatisierten Fahrzeugs gespeichert. Sobald das Fahrzeug den definierten Auslösebereich erreicht, sendet die OBU die spezifische Warnmeldungen "Stationary vehicle - public transport stop" (siehe Abbildung) aus. C-ITS-fähige Fahrzeuge empfangen diese Meldungen und leiten sie an das Zentralsystem weiter. Wenn sich eine ITS-G5 RSU in der Nähe befindet, sendet auch diese Einheit die Meldung an das Zentralsystem aus.
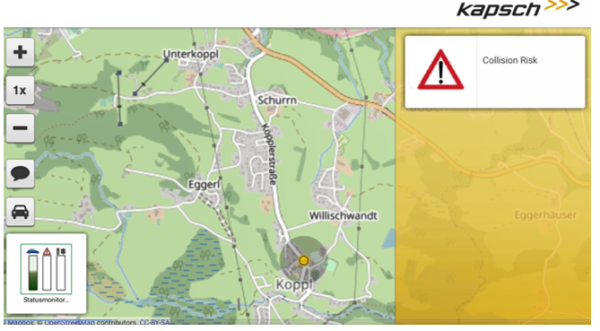
Der Use Case “Public Transport Vehicle Crossing” ist relevant, wenn ein automatisiertes Fahrzeug sich beispielsweise in eine Vorrangstraße einordnet oder ein Linksabbiegemanöver durchführt und dabei den Gegenverkehr kreuzt. Auch hier müssen die Auslösebereiche vorab definiert und in der OBU gespeichert werden. Die Warnmeldungen werden dann als “Collision Risk” (siehe Abbildung) an Fahrzeuge und ITS-G5 RSU in der Nähe gesendet. Durch diesen Informationsaustausch zwischen der Infrastruktur und dem automatisierten Fahrzeug wird die Verkehrssicherheit erhöht.
Entlang des Korridors nach Salzburg wurden drei weitere RSUs installiert. Der Fokus liegt auf der reibungslosen Durchfahrt von Bussen des öffentlichen Verkehrs in die Stadt. Die Verkehrssicherheit wird dadurch erhöht und der Verkehrsfluss optimiert. Die RSUs übermitteln Nachrichten zu verschiedenen Aspekten, einschließlich Gefahrenmeldungen wie Wetterwarnungen, Hinweise zu Straßenarbeiten, sowie die Sammlung von Fahrzeug- und Ereignisdaten.
Besonders an Ampelkreuzungen entlang des Buskorridors werden Informationen über die aktuelle Ampelphase übertragen und Anwendungsfälle für die Busbevorrangung getestet.

